
Matrix and Cyclic Subgroups
The third lecture on group theory

Last time, we introduced the notion of a subgroup, and we noted that there are many interesting examples that one can produce in such a way.

However, we only actually gave one example explicitly: the isometry group of the square. Let’s rectify this and produce some more.
Any group G whatsoever is guaranteed to have the following two subgroups1: the subgroup {1}, which contains just the identity; and the subgroup G, which contains everything in G. Verifying that both are subgroups is very easy, and in some sense they are maximally uninteresting subgroups—we call them the trivial subgroups. There are various definitions and theorems that are best stated as applying to all non-trivial subgroups. (We will see this when we talk about simple groups, for example.)
Fix a field 𝔽 (if you don’t know what a field is, just use the rational numbers ℚ, the real numbers ℝ, or the complex numbers ℂ; these are all common fields), and consider the set of invertible n×n matrices with coefficients in 𝔽. (If you know your linear algebra, invertible is the same as having non-zero determinant, which is the same as having rank n, which is the same as having trivial kernel. If you don’t know your linear algebra, an invertible matrix M is one for which there exists another matrix N such that MN=NM is the identity matrix.) We call this set GL(n, 𝔽)2; it is called the general linear group.
As one might guess from the name, GL(n, 𝔽) is a group—proving this is, in my estimation, an important part of a basic class in linear algebra, although the word “group” might never be uttered. Even so, one checks that matrix multiplication is associative, that products of invertible matrices are invertible, and so on.3 Subgroups of GL(n, 𝔽) are called matrix groups, and they are quite varied—indeed, we’ll prove later on that any finite group can be represented as a matrix group.
For now, consider O(n, ℝ)—the orthogonal group. This consists of all matrices M in GL(n, ℝ) such that MTM=I. (Here, MT is the transpose of M: the result of flipping M along its main diagonal. That is, the (i,j)-th entry of M is the (j,i)-th entry of MT.)
Is this a subgroup? Yes: one checks that (MN)T=NTMT and that (MT)-1=(M-1)T. (These are standard results from linear algebra; I will take them as given.) And, therefore, if M, N are in O(n, ℝ), then
whence MN and M-1 are both in O(n, ℝ).
Okay, but what is it? How should we think about this? To understand that, let’s remember the dot product of two vectors in ℝn, which we can write as
Since
we see that the dot product of a vector with itself is the square of its length.
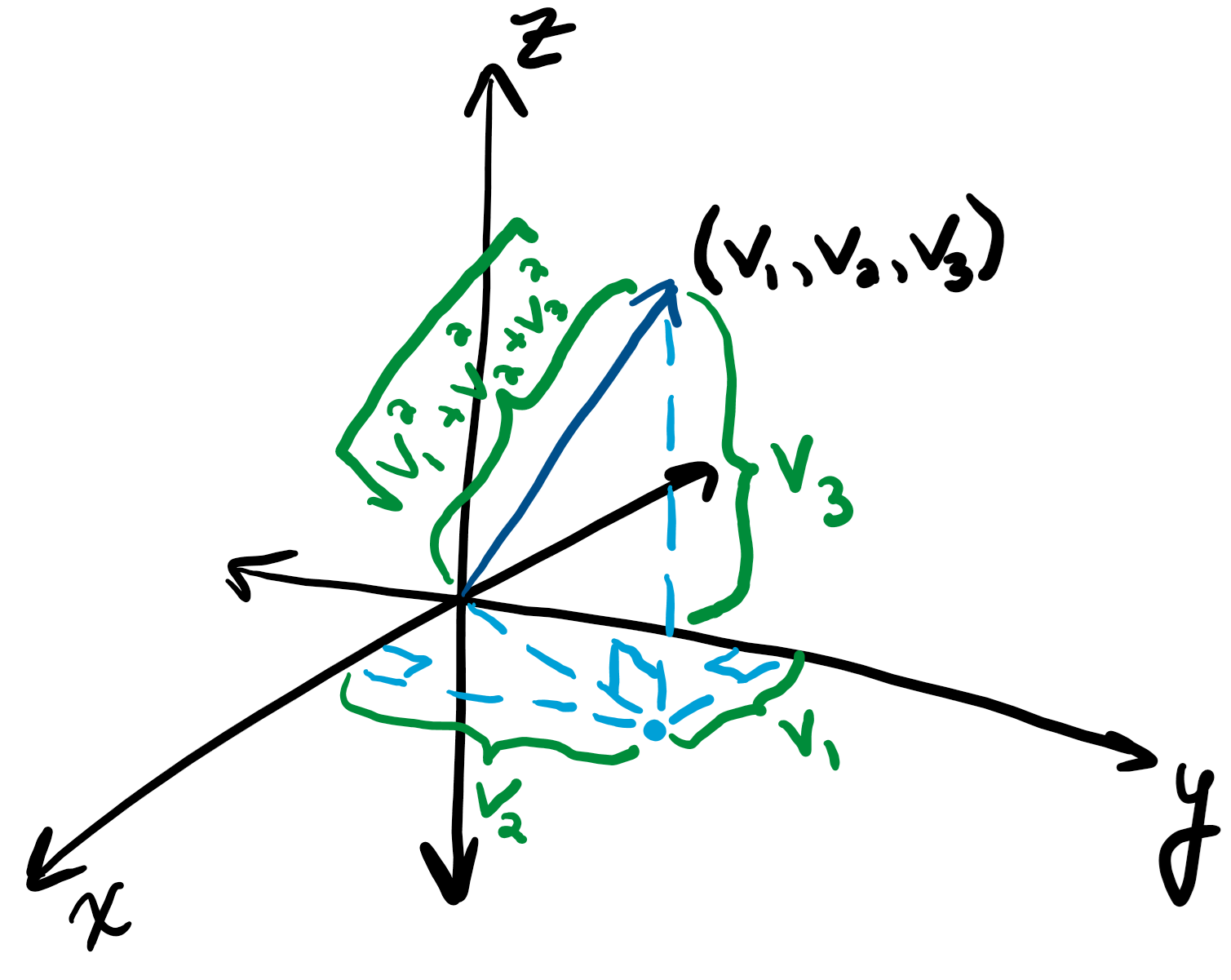
On the other hand, suppose we take a vector in ℝn and multiply by any matrix M in O(n, ℝ). What happens? Well,
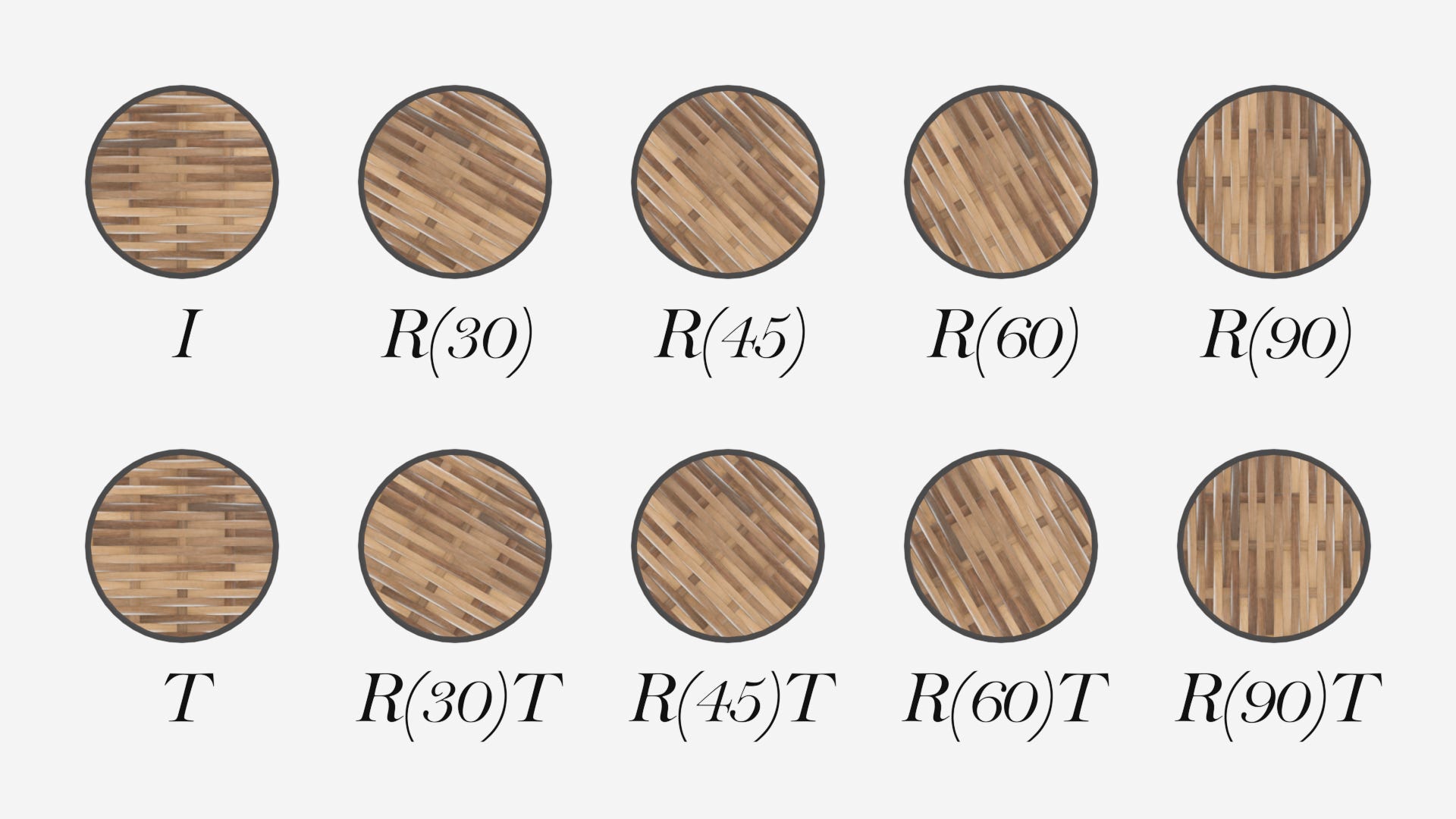
Ah ha! So the vector that we get as a result of multiplying by M has the same length as the original! This means that O(n, ℝ) consists of transformations of ℝn that fix the origin (since M(0,0,…,0)=(0,0,…,0) by the rules of matrix multiplication) and preserve distances—that is, they are isometries! For example, you can check that O(2, ℝ) consists of all rotations of the plane around the origin, as well as all reflections across lines through the origin.
More generally, one checks that O(n, ℝ) consists of all isometries of ℝn that fix the origin. Both of these are included in the optional exercises that you can find at the bottom of this post. (Available for paid subscribers.)
Let’s take a break from matrix groups and consider a more general family of examples. Choose any group G and choose any element g inside of G. For any positive integer n, we define:
It is then easy to verify that for any two integers m and n, gm⋅gn=gm+n. (This is exactly the same rule as exponentiation for real or complex numbers, but it applies much more broadly.) With this in mind, define
This is the subgroup generated by g, also known as a cyclic subgroup. We call g the generator. More generally, if a group G contains an element g such that G is the subgroup generated by g, we say that G is cyclic.
That the cyclic subgroup is a subgroup immediately follows from the exponentiation law. Why is it called “cyclic”? To understand this better, let’s take a concrete example: take the subgroup generated by a rotation by 60 degrees in O(2, ℝ).
It consists of exactly six elements: 1, g, g2, g3, g4, g5. This is because g6 is a rotation by 360 degrees, which is just the identity again: g6=g0. Thus, for any integers n, k, g6n+k=gk. So, once we have the first six, we can get everything else just by shifting. A diagram of this subgroup looks like a cycle.
Here’s another example: the set of non-zero complex numbers ℂ× is a group under multiplication. Consider the cyclic subgroup generated by
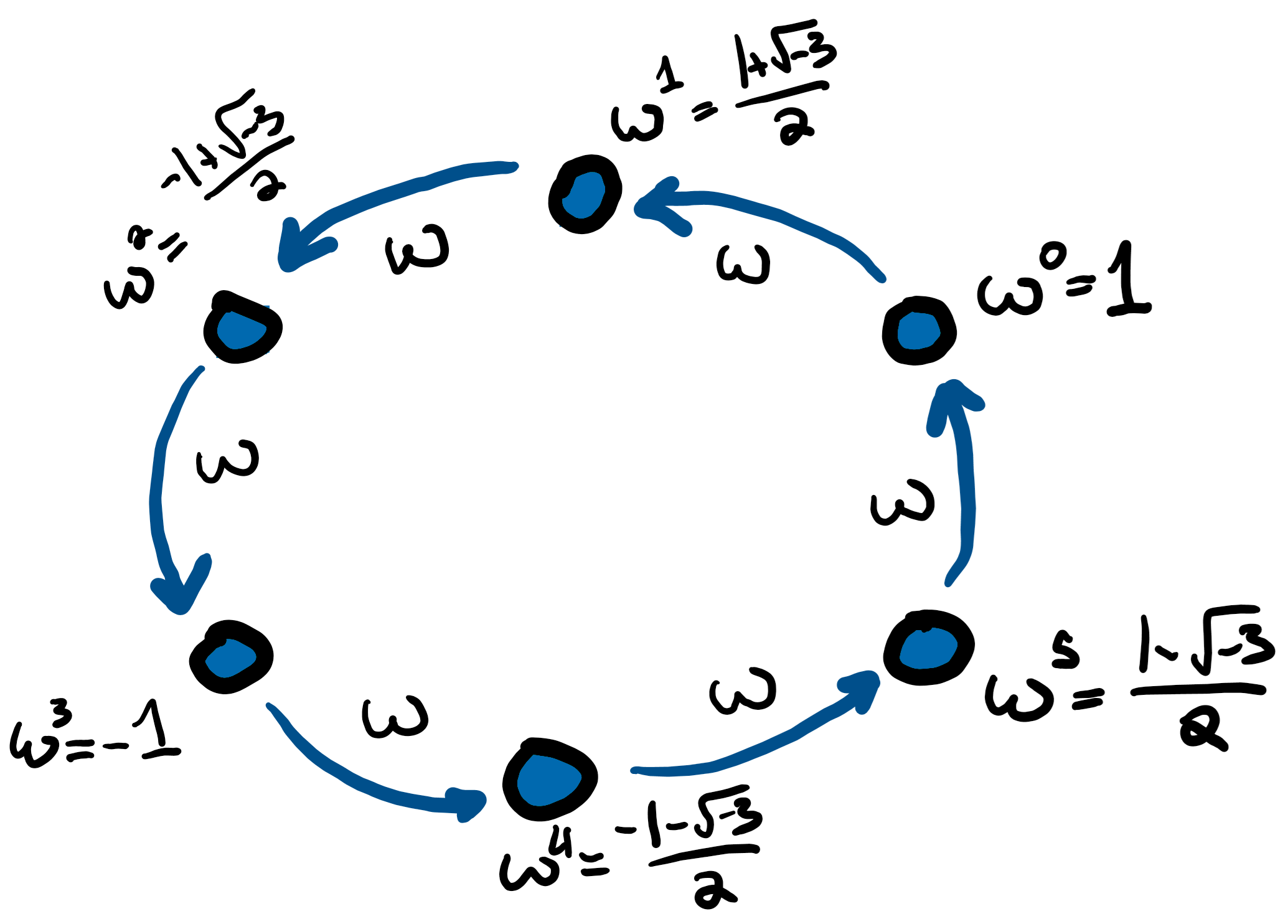
This is, once again, a cycle, and for the exact same reason: ω6=1. If you think about it, you will recognize that any time that an element g of a group G satisfies gn=1 for some positive integer n, then the subgroup generated by g will look like a cycle. This motivates the following definition.
Definition: Let g be an element of a group G. The order of g is the smallest positive integer n such that gn=1, or ∞ if no such integer exists.
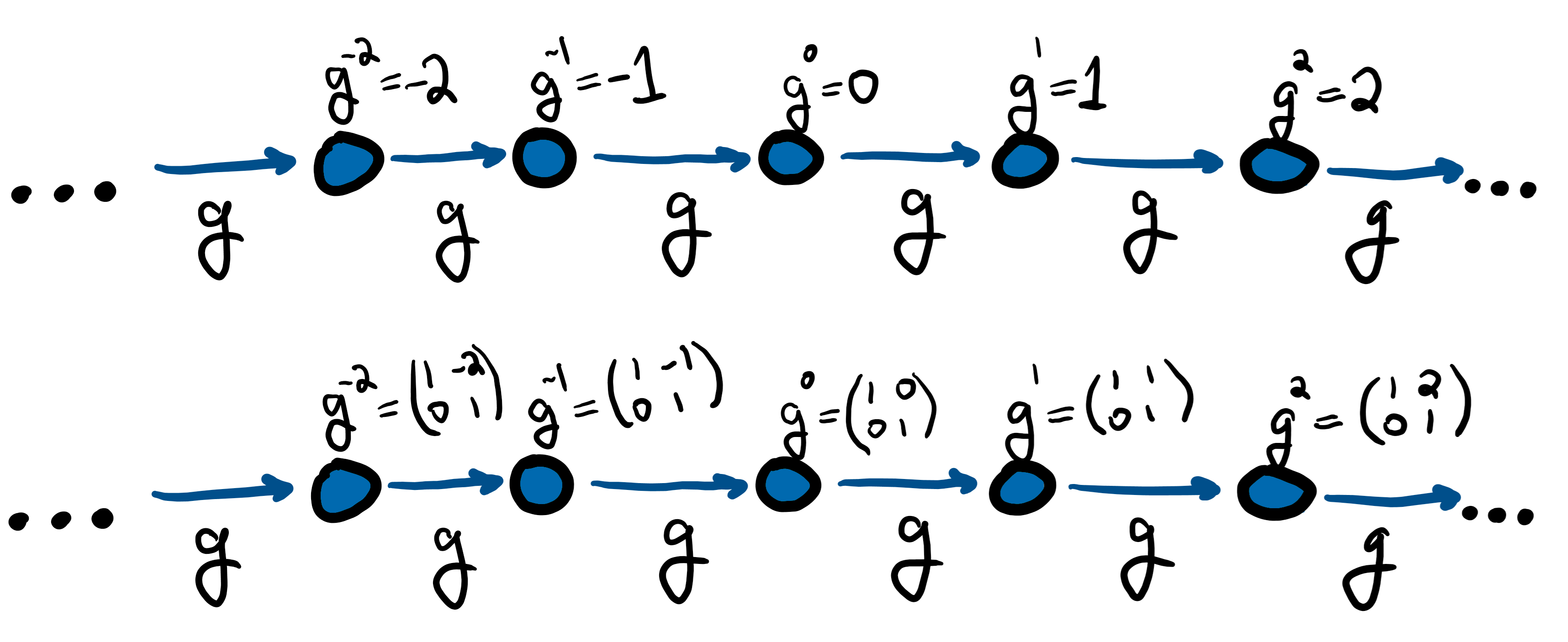
Does the second possibility occur? Yes, all the time: consider 1 inside of ℝ, considered as a group under addition. Or the matrix
inside of GL(2, ℝ). In both cases, if we consider the corresponding cyclic groups, they look different.
One thing that you might notice from all of these examples is that what a cyclic subgroup looks like seems to be entirely determined by the order of the generator. If the generators have the same order, these are the “same” subgroups, even though they may be subgroups of very different groups.
How to make that notion precise? For that, we shall need the idea of isomorphism—but that will have to wait until next time.
